Tìm hiểu Mạng truyền thông CAN trong ô tô hiện đại: Nguyên lý, ứng dụng và xu hướng phát triển
Thứ năm, 05/06/2025, 12:57 (GMT+7)
Mạng truyền thông CAN (Controller Area Network) đã trở thành một trong những giao thức truyền thông chủ đạo trong ngành công nghiệp ô tô hiện đại. Bài báo này trình bày tổng quan về nguyên lý hoạt động, kiến trúc phần cứng, định dạng khung dữ liệu và các phiên bản của mạng CAN, từ đó làm rõ vai trò của CAN trong hệ thống điều khiển ô tô như điều khiển truyền lực, an toàn chủ động và thụ động, hệ thống thông tin giải trí và chẩn đoán. Bài viết cũng phân tích các hạn chế của CAN truyền thống, đặc biệt về tốc độ truyền và bảo mật, đồng thời giới thiệu các giải pháp thay thế hiện đại như CAN FD, FlexRay và Automotive Ethernet. Cuối cùng, bài báo đánh giá xu hướng phát triển mạng truyền thông trong bối cảnh số hóa và tự động hóa phương tiện giao thông.
1. GIỚI THIỆU
Sự phát triển nhanh chóng của ngành công nghiệp ô tô hiện đại đòi hỏi các hệ thống điều khiển điện tử phức tạp, có khả năng giao tiếp linh hoạt, chính xác và đáng tin cậy. Mạng khu vực điều khiển (Controller Area Network – CAN), được phát triển bởi Bosch, là một chuẩn truyền thông nối tiếp đã được chấp nhận rộng rãi trong ngành công nghiệp ô tô từ cuối những năm 1980. Nhờ tính ổn định, tốc độ truyền dữ liệu tương đối cao, khả năng xử lý lỗi hiệu quả và chi phí triển khai thấp, CAN trở thành xương sống của hầu hết các mạng điện tử trong xe hơi hiện nay.
2. KIẾN TRÚC VÀ NGUYÊN LÝ HOẠT ĐỘNG CỦA MẠNG CAN
2.1 Cấu trúc phần cứng mạng CAN
Một mạng CAN bao gồm các nút (nodes), mỗi nút bao gồm bộ xử lý trung tâm, bộ điều khiển CAN và bộ thu phát CAN. Tín hiệu được truyền theo dạng vi sai thông qua hai dây xoắn đôi (CAN_H và CAN_L), giúp giảm nhiễu điện từ. Hệ thống yêu cầu điện trở kết thúc 120 Ω ở hai đầu của bus để ngăn hiện tượng phản xạ tín hiệu.
.png)
Hình 1. Cấu trúc mạng CAN
2.2 Nguyên lý truyền tin và phân quyền
CAN sử dụng phương pháp truyền đa chủ (multi-master) và hướng sự kiện (event-driven). Khi nhiều nút muốn truyền cùng lúc, cơ chế trọng tài dựa trên ID ưu tiên sẽ quyết định nút nào được quyền truyền tiếp. CAN sử dụng mã kiểm tra CRC và khe xác nhận (ACK) để đảm bảo độ tin cậy cao.
3. ĐỊNH DẠNG KHUNG CAN VÀ CÁC PHIÊN BẢN
3.1 Định dạng khung CAN
Khung dữ liệu CAN gồm: bit bắt đầu (SOF), ID trọng tài (11 hoặc 29 bit), bit RTR, DLC, dữ liệu (0-8 byte với CAN 2.0, lên đến 64 byte với CAN FD), CRC, bit xác nhận ACK và bit kết thúc. CAN sử dụng định dạng mã hóa không trả về số không (NRZ).
3.2 Các phiên bản phổ biến
- CAN 2.0A/B (CAN cổ điển): Tốc độ lên đến 1 Mbit/s, dữ liệu tối đa 8 byte. CAN 2.0A sử dụng ID 11 bit, trong khi 2.0B sử dụng ID 29 bit.
- CAN FD: Cho phép tốc độ lên đến 8 Mbit/s và kích thước dữ liệu lên đến 64 byte, tăng thông lượng và giảm số lượng khung truyền.
- CAN XL: Tốc độ tối đa 20 Mbit/s, dữ liệu tối đa 2048 byte, cho phép truyền tải các giao thức lớp cao như IP hoặc Ethernet.
4. PHÂN LOẠI VÀ ỨNG DỤNG CỦA CAN TRONG Ô TÔ
4.1 Phân loại theo tốc độ
- CAN tốc độ thấp (LS-CAN): 125 kbit/s, có khả năng chịu lỗi tốt, thích hợp với các thiết bị tiện nghi như ghế chỉnh điện, gương, cửa kính.
.png)
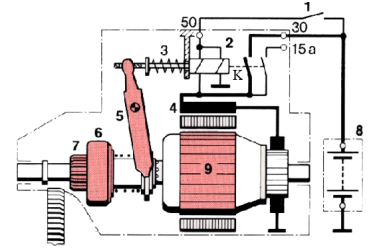
Hình 2. Bus CAN tốc độ thấp có khả năng chịu lỗi
- CAN tốc độ cao (HS-CAN): 500 kbit/s đến 1 Mbit/s, dùng cho hệ thống động cơ, phanh ABS, hệ thống an toàn.
.png)
Hình 3. Bus CAN tốc độ cao
- CAN dây đơn (Single-wire CAN): Tốc độ thấp , tiết kiệm dây, dùng cho hệ thống phụ trợ như điều khiển đèn, kính.
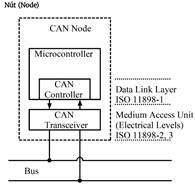
Hình 4. CAN bus node
4.2 Ứng dụng thực tế
- Điều khiển hệ thống truyền lực (động cơ, hộp số).
- Hệ thống an toàn (phanh ABS, ESP, túi khí).
- Thông tin giải trí và định vị.
- Chẩn đoán lỗi điện tử (OBD-II).
- Giao tiếp xe với xe (V2V), xe với hạ tầng (V2I).
5. NHỮNG HẠN CHẾ VÀ XU HƯỚNG PHÁT TRIỂN
5.1 Hạn chế của CAN
- Giới hạn tốc độ: Chỉ đạt tối đa 1 Mbit/s, không đáp ứng yêu cầu truyền dữ liệu lớn.
- Thiếu tính bảo mật nội tại: Không có cơ chế mã hóa, dễ bị tấn công.
- Khả năng mở rộng giới hạn: Quản lý mạng phức tạp khi số nút tăng cao.
5.2 Giải pháp thay thế
- CAN FD: Tốc độ và dữ liệu cao hơn, tương thích ngược với CAN 2.0.
- FlexRay: Truyền song song, độ trễ thấp, thích hợp cho các ứng dụng an toàn cao.
- Automotive Ethernet: Băng thông lớn, hỗ trợ truyền hình ảnh, video, phần mềm.
Mạng truyền thông CAN đã và đang đóng vai trò cốt lõi trong kết nối các thiết bị điện tử trên xe ô tô nhờ tính ổn định, độ tin cậy và khả năng triển khai linh hoạt. Tuy nhiên, trong bối cảnh phương tiện thông minh và hệ thống hỗ trợ người lái ngày càng phát triển, nhu cầu về tốc độ cao, băng thông rộng và bảo mật mạnh mẽ đòi hỏi các công nghệ truyền thông mới hơn như CAN FD, FlexRay và Automotive Ethernet. Hiểu rõ về mạng CAN cũng như các giới hạn và định hướng phát triển tương lai sẽ giúp kỹ sư ô tô chủ động tích hợp và tối ưu hóa các hệ thống điện – điện tử trong xe một cách hiệu quả.