NGHIÊN CỨU MỘT SỐ TÍNH NĂNG AN TOÀN CHỦ ĐỘNG TRÊN XE DU LỊCH ĐỜI MỚI
Thứ ba, 05/11/2024, 15:47 (GMT+7)
Bài viết đề cập đến một số nội dung về nguyên tắc và tính năng của cảm biến I-Activsense; các điều kiện hoạt động của chức năng I- Activsense và phạm vi hoạt động, các mục cảnh báo; các thành phần chính tạo nên hệ thống.
Thông qua bài viết này giúp các em sinh viên, các kỹ sư công nghệ ô tô làm tài liệu để cập nhật kiến thức mới cũng như ứng dụng vào việc sử dụng, kiểm tra chẩn đoán các các triệu chứng liên quan.
1. Công nghệ I-ACTIVSENSE
1.1. Tổng quan về I-Activsense
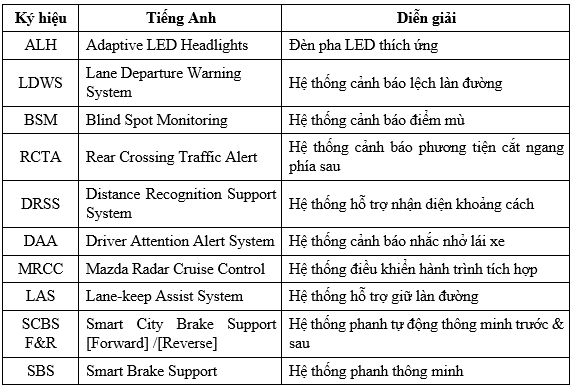
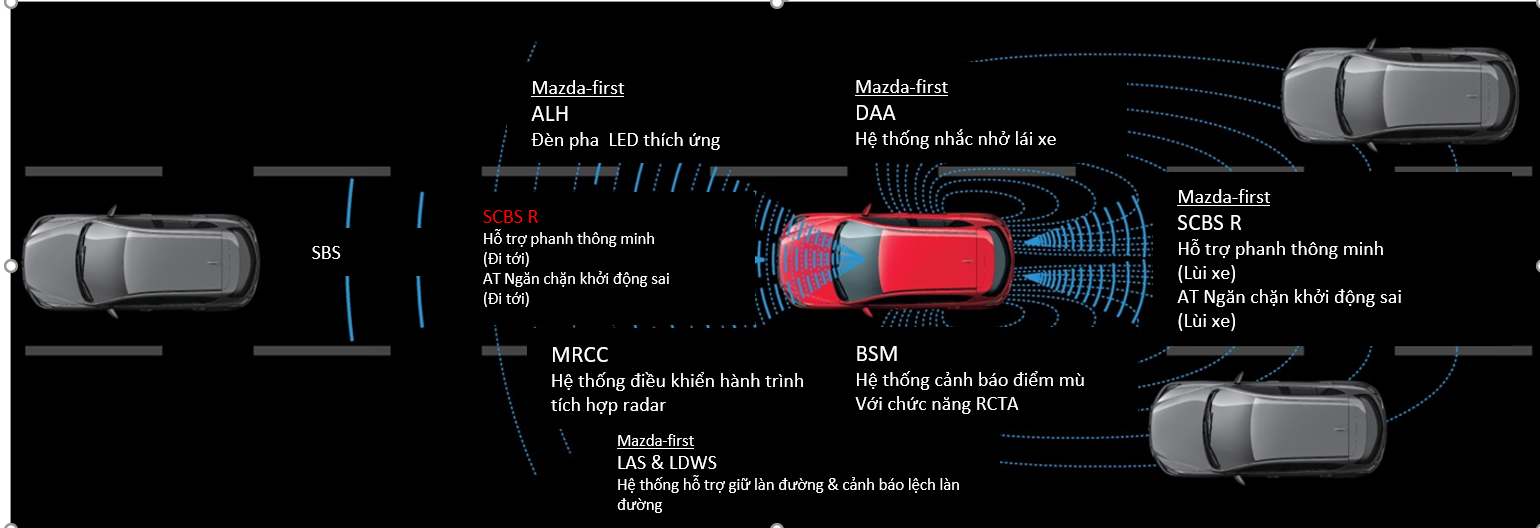
Công nghệ I-ACTIVSENSE là tên gọi của tổ hợp các công nghệ tiên tiến được áp dụng trên các xe du lịch hiện nay (bao gồm hệ thống an toàn chủ động & hệ thống cảnh báo tiền va chạm). Nhằm giúp tăng tính an toàn và hỗ trợ người lái tối đa trong khi vận hành xe.
Tổng quan chung:
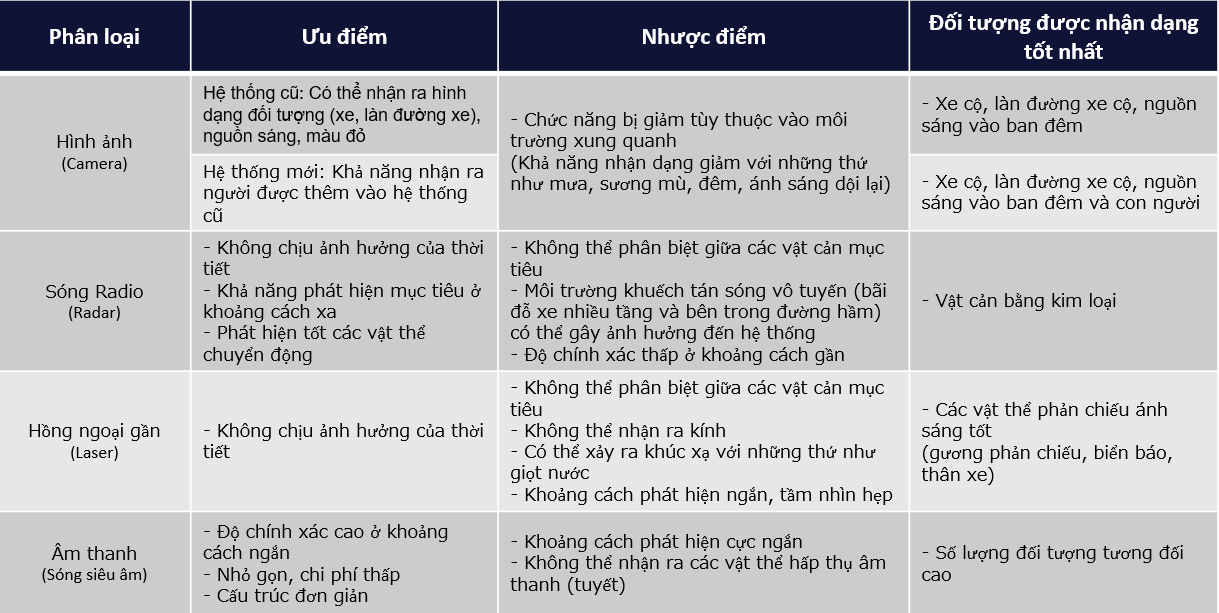
2. Thành phần và tính năng của các cảm biến trong hệ thống i-Activsense
- Các loại cảm biến trên xe: (1) Cảm biến hồng ngoại gần (cảm biến laser); (2) Camera cảm biến phía trước; (3) Cảm biến Radar; (4) Cảm biến sóng siêu âm
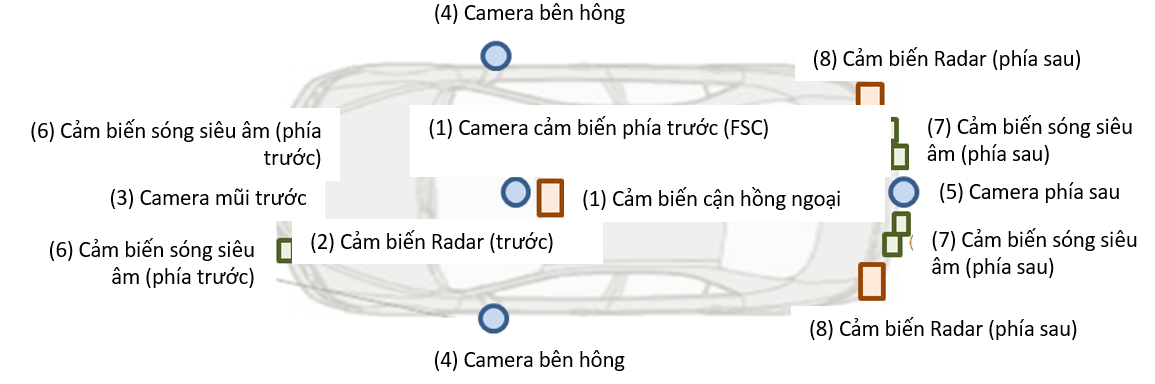
Hình 1. Vị trí các cảm biến trong I-Activsense
- Vị trí và chức năng của các cảm biến, Camera:
(1) Camera cảm biến phía trước (FSC)
- Theo dõi làn đường
- Cho phép đèn pha/ đèn hậu/ đèn đường (vào ban đêm)
- Ghi nhận phương tiện phía trước, người đi bộ, chướng ngại vật, biển báo giao thông
(1) Cảm biến cận hồng ngoại
- Phát hiện xe phía trước và chướng ngại vật
(2) Cảm biến Radar (trước)
- Phát hiện xe phía trước và chướng ngại vật
(3) Camera mũi trước
- Hình dung các điều kiện phía trước của chiếc xe
(4) Camera bên hông
- Hình dung các điều kiện ở hai bên thân xe
(5) Camera phía sau
- Hình dung các điều kiện phía sau xe
(6) Cảm biến sóng siêu âm (phía trước)
- Phát hiện vật cản xung quanh phía trước xe
(7) Cảm biến sóng siêu âm (phía sau)
- Phát hiện vật cản xung quanh phía sau xe
(8) Cảm biến Radar (phía sau)
- Phát hiện các phương tiện tiếp cận từ phía sau và chướng ngại vật
2.1. Cảm biến hồng ngoại gần (cảm biến laser)
Phát ra hồng ngoại (laser) từ ba vị trí; giữa, trái và phải. Sau đó hệ thống nhận được sự phản chiếu và tính toán khoảng cách đến một chiếc xe phía trước, tốc độ xe tương đối.
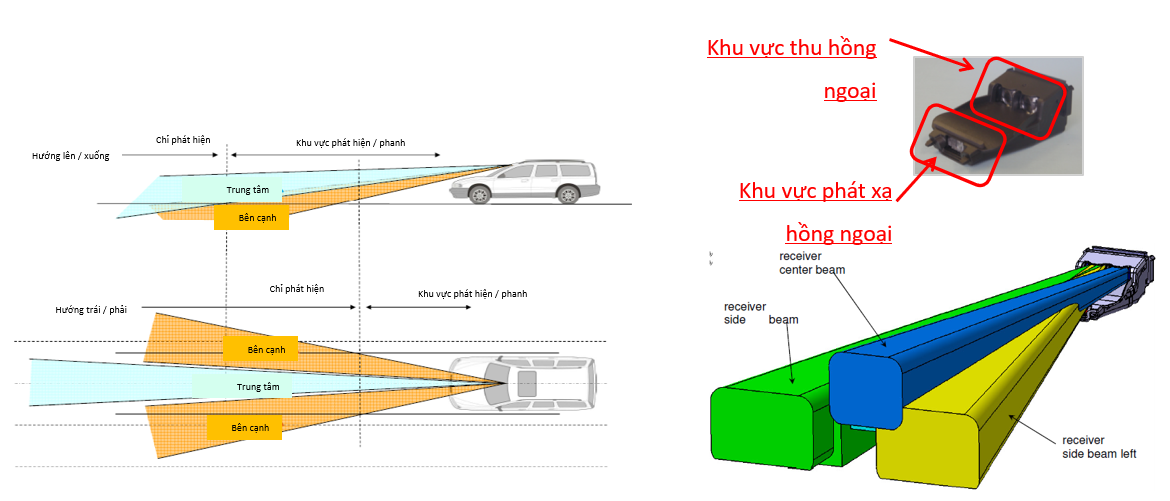
Hình 2. Cảm biến hồng ngoaij gần phía trước
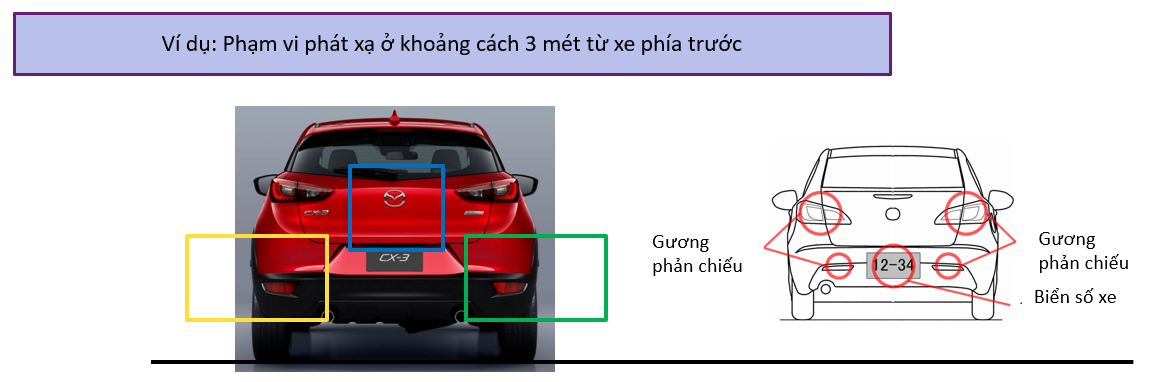
Hình 3. Cảm biến hồng ngoại gần phía sau
Cảm biến hồng ngoại gần phía sau: Nhắm các phương tiện phía trước ngay lập tức và phát ra một chùm tia mạnh có hướng xuyên qua kính chắn gió. Phát hiện các phương tiện phía trước bằng cách chọn các phản xạ mạnh chủ yếu từ gương phản xạ và biển số ở sau của xe phía trước.
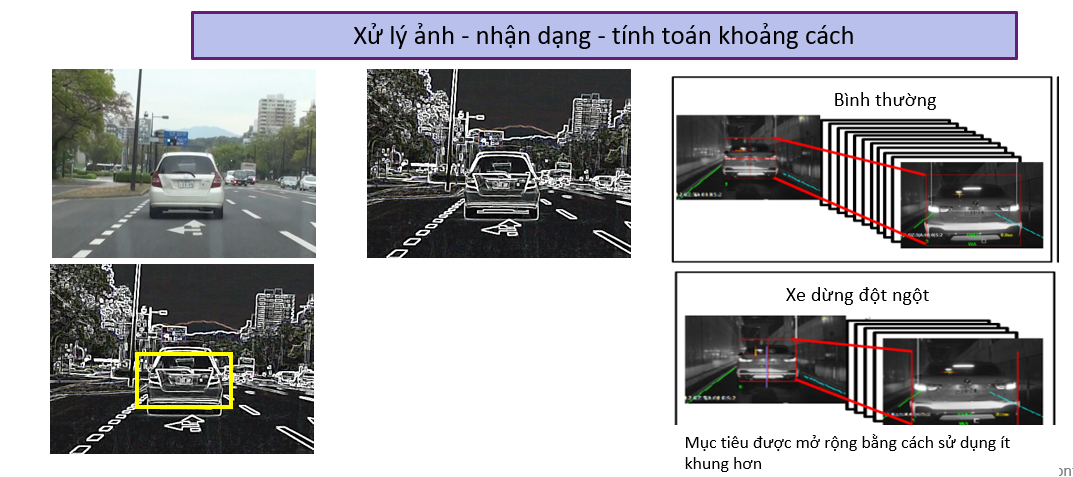
2.2. Camera cảm biến phía trước
Với cảm biến hình ảnh, hình ảnh được chụp bởi camera đã được xử lý, mục tiêu được nhận dạng và khoảng cách đến mục tiêu được tính toán.
Hình 4. Camera cảm biến hình ảnh phía trước
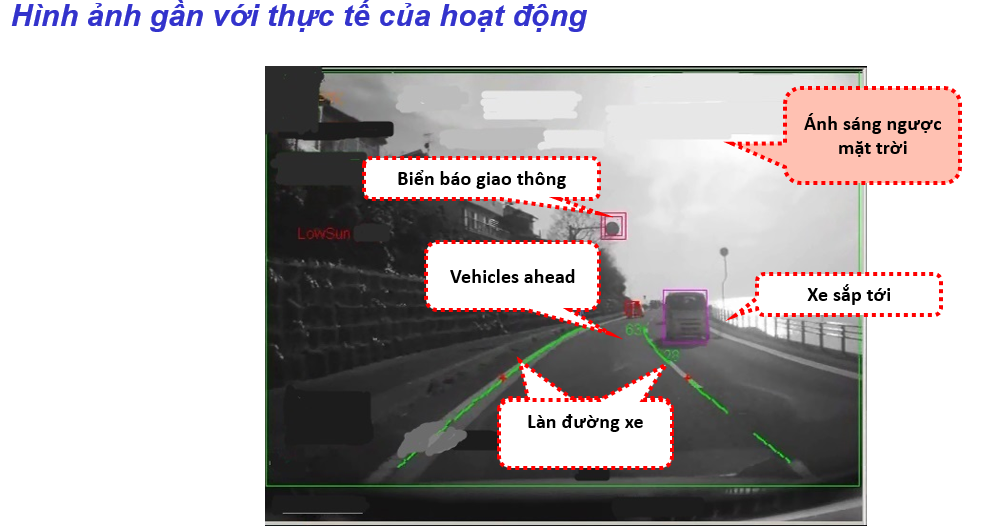
Hình 5. Hình ảnh thực tế khi hoạt động
2.3. Cảm biến Radar
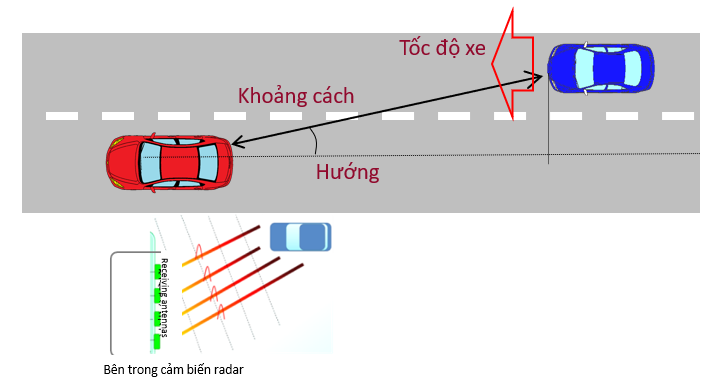
Hình 6. Cảm biến radar
- Phát ra sóng vô tuyến, truyền qua không gian và nhận sóng vô tuyến phản xạ lại.
- Các sóng phản xạ được nhận bởi nhiều ăng ten trong cảm biến radar, khoảng cách và hướng được phát hiện bằng cách đo sự khác biệt về thời gian.
2.4. Cảm biến sóng siêu âm
Các cảm biến siêu âm truyền sóng siêu âm bằng cách sử dụng các phần tử gốm áp điện và thời gian cho đến khi sóng siêu âm phản xạ lại từ các đối tượng mục tiêu được tiếp nhận bởi micrô
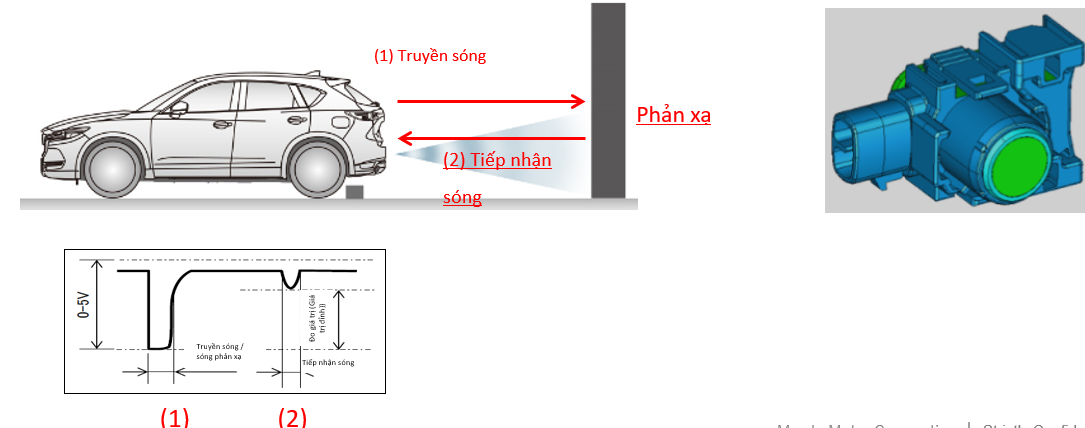
Hình 7. Cảm biến sóng siêu âm
2.5. Các tính năng theo loại riêng biệt